Article paru dans L'Ordinateur Individuel d'avril 1979
(signé Pierre Berger, mais en partie réécrit par la rédaction; en fin d'article, notes préalables )
Pour un grand nombre de personnes, un robot est à la fois une espèce d'humanoïde telle que nous en avons tous rencontré dans les bandes dessinées de notre enfance et dans les romans de science fiction, et le « robot ménager », dont la télévision leur vante quotidiennement les prouesses. D'autres savent, de plus, pour les avoir côtoyés, que des robots sont utilisés dans un certain nombre d'usines. Dans ce dernier cas, ils s'y présentent d'ailleurs plus sous la forme d'une espèce de bras articulé aux formes étranges plutôt que sous forme de quoi que ce soit d'humain. En fait, l'idée générale qu'on se fait de ce qu'est un robot ne correspond absolument pas à la réalité. Ce qu'on appelle « robot ménager » n'est pas un robot, et point n'est besoin d'avoir une forme humanoïde pour en être.
Un robot est en fait un système plus ou moins autonome (à l'exception d'un éventuel câble d'alimentation électrique), ce qui ne veut pas forcément dire automobile, et qui « vit » en accomplissant une certaine tâche. Il dispose d'informations en provenance de l'extérieur,qu'il traite et interprète pour assurer, avec une assez grande marge de manoeuvre, la tâche qui lui est fixée.
Il est certain qu'avec les microprocesseurs, la réalisation d'un robot est maintenant assez facile. Mais les premiers robots « à comportement humain » ont été réalisées dans les années cinquante, uniquement avec de l'électronique linéaire, des relais et des servomécanismes.
Le robot qui vous est présenté ici est un robot « méditatif » : il ne se déplace pas, et ne fait que penser, tout en manifestant un comportement assez avare et égocentrique qui l'amène à demander à tous les passants « t'as pas cent balles ? ».
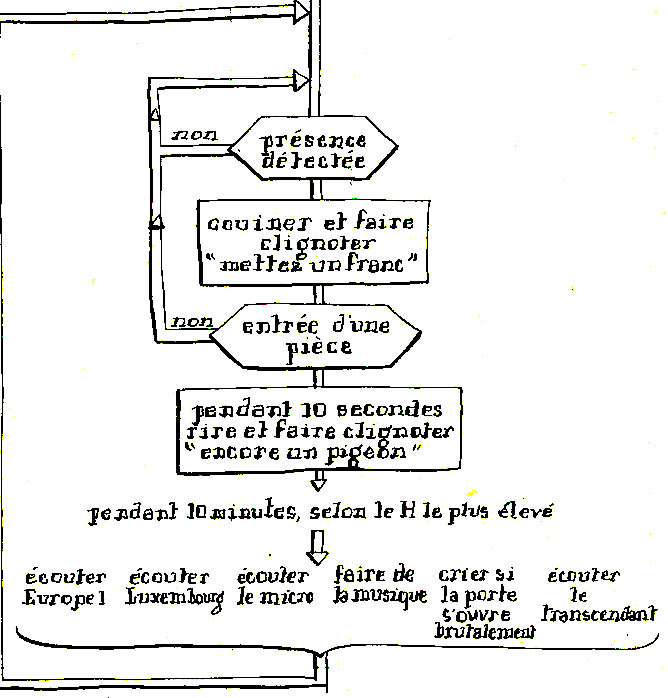
Figure 1. Schéma fonctionnel. La fonction P est parcourue verticalement ; la fonction H, en période d'activité normale, choisit entre les différentes possibilités.

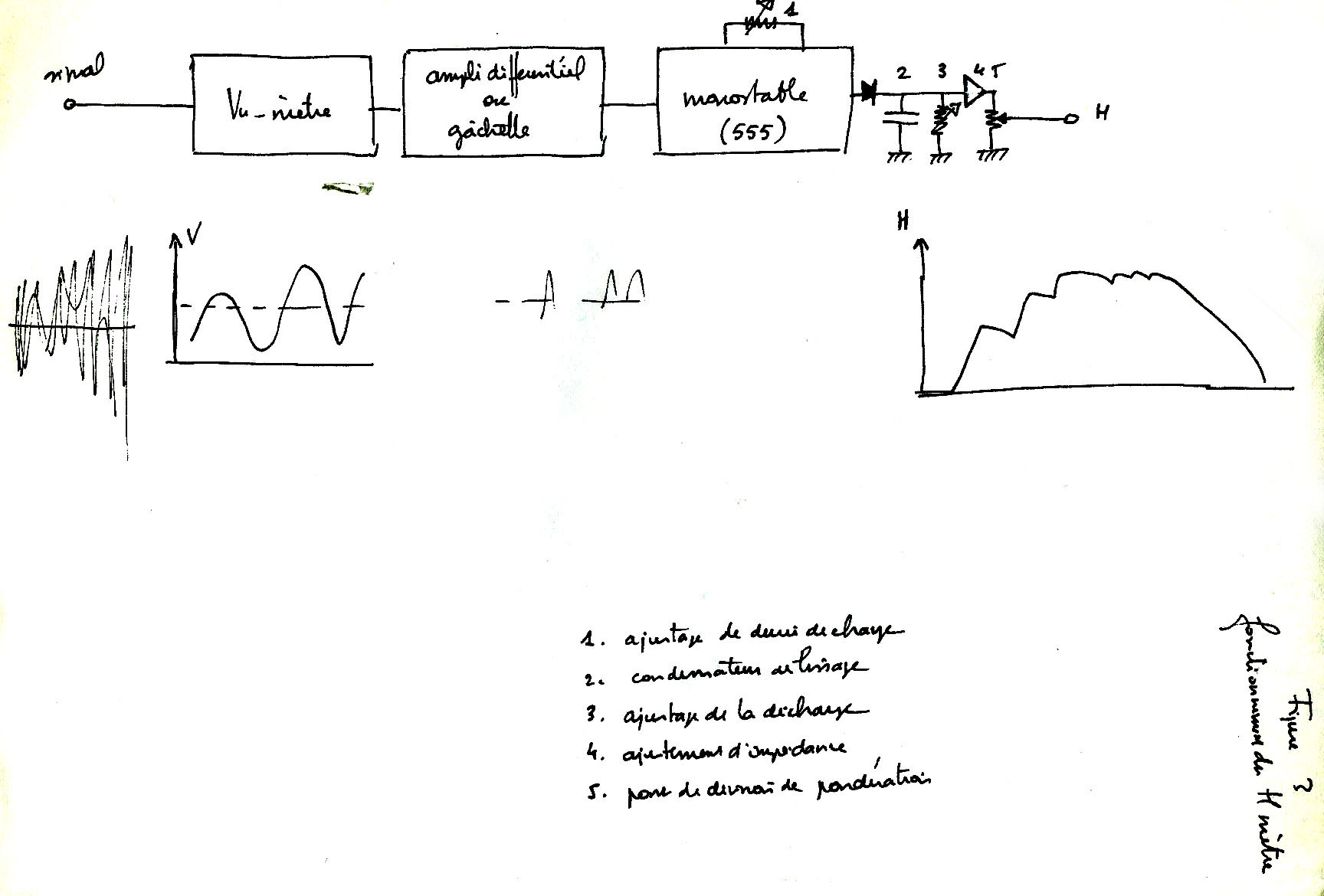
Figure 3. Principe de fonctionnement du H-mètre dans le cas des tuners et du micro. Le signal est redressé, réduit à des impulsions qui commandent le monostable.
L'idal de Max : devenir riche sans rien faire
Max le Robot a deux grands objectifs dans la vie : gagner de l'argent et se distraire. A certains moments, il fera la seconde activité, à d'autres c'est la première qui l'emportera. En fait, ces activités sont mesurées et traduites en deux fonctions, la fonction P et la fonction H. Sa satisfaction globale est tradutie par une fonctdin L qui es la somme P+H de P et de H.
Pour exister, Max doit gagner de l'argent, et le fait en mendiant : il « couine » et fait clignoter « mettez 1 F ». Quand un passant met une pièce (la présence d'un passant est détectée par les variations d'éclairement d'une cellule photo-électrque), Max considère d'abord que sa fonction P est saturée (et même sa fonction L toute entière) et se paye quelques secondes de bon temps aux déens du payeur ("ivressed" : rire et affichage d'un message « encore un pigeon »! ). Ensuite, il prend son activité normale pendant une dizaine de minutes, après quoi il recommence à mendier, car il a faim.
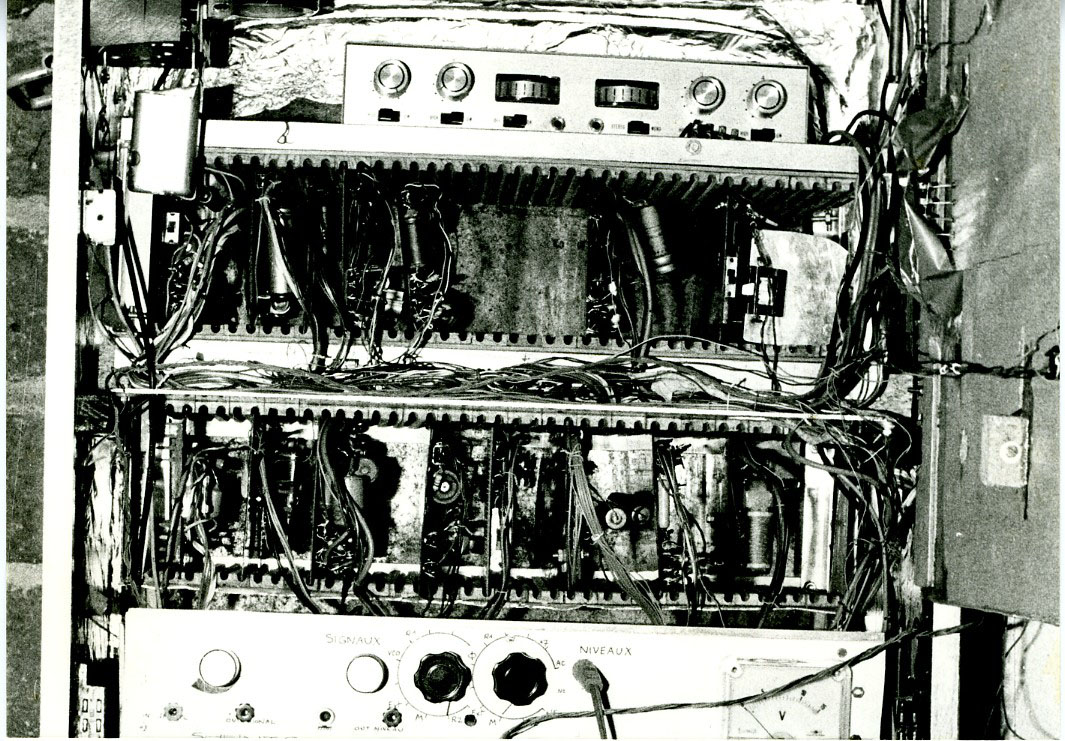
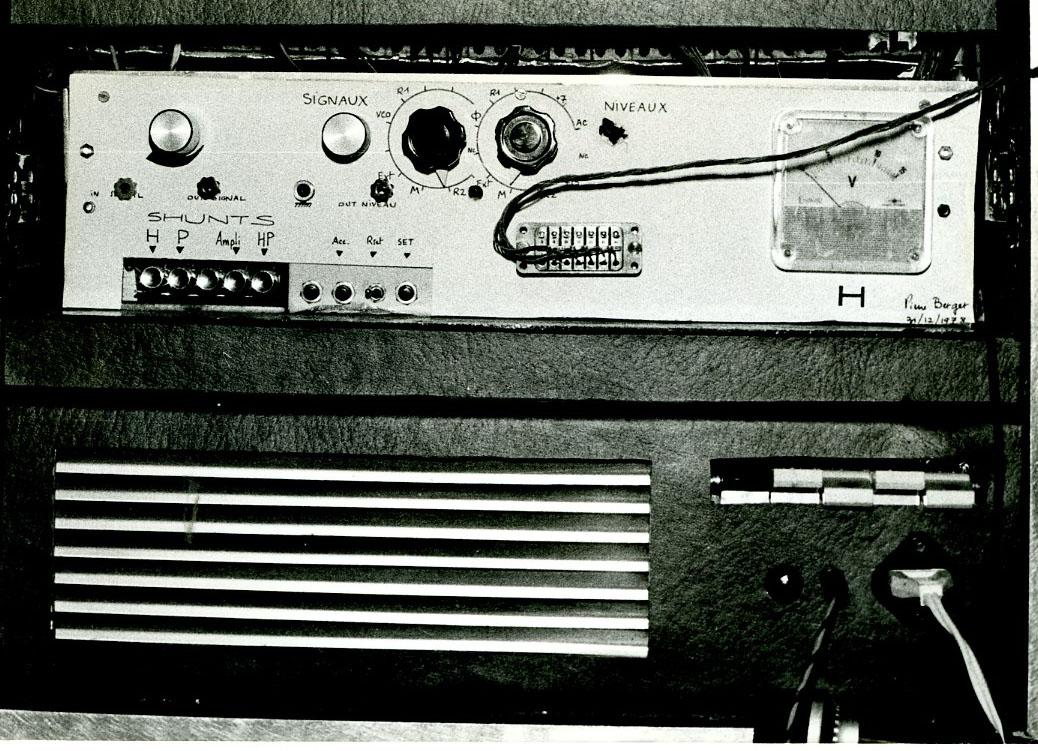
Un câblage d'amateur. Un professionnel en avalerait son fer à souder... Mais ça marche.
Pendant sa période normale d'activité (entre faim et ivresse), Max choisit la plus intéressante des occupations qui lui sont possibles, c'est sa fonction H. Faute de mieux, il écoute la radio, en choisissant celle qui lui semble la plus variée. Il préfère, quand cela se présente, écouter un interlocuteur qui lui parle dans un micro. Mieux encore, il adore qu'on l'utilise pour faire de la musique. Cependant, il interrompt son activité soit en présence d'un danger (coup donné dans la porte de l'atelier), auquel cas il proteste bruyament, soit en foncdtion d'un improbable mais irrésistible appel de la transcendance. (*)
(*) En l'occurrence, la transcendance est représentée par l'épouse de l'auteur, qui dispose dans la cuisine d'un bouton adéquat destiné à sortir le génial et phallocatte père de Max de son atelier chéri à l'heure du dîner.
La fonction P est matérialisée par un double temporisateur (555). Elle se déclenche par l'entrée d'une pièce et commande alors des relais pour assurer diverses activités.
Pour la fonction H, j'ai cherché une solution simple exprimant à tout instant, sous forme d'une tension continue, la variété de chaque activité possible. Ce sotn les « H-mètres) vori figure 3).
Pour chaque activité, on commence par expliciter une grandeur exprimant l'évolution du phénomène concerné. Pour les deux radios et le micro, cette variable est donnée par un Vu-mètre. Chaque modification signitificative de cette grandeur, par exemple le dépassement d'un seuil ou une variation rapide, est considérée comme un événément et déclenche une impulsion qui charge un condensaeur. Ce dernier se décharge ensuite peu à peu à travers une résistance (ajustable).
La tension aux bornes de ce condensateur donne donc une sorte de lissage du nombre d'événements survenus récemment sur cette activité. On atteint un seuil si on a une suite d'événements rapprochés, et l'on revient progressivement à 0 quand « rien ne se passe »
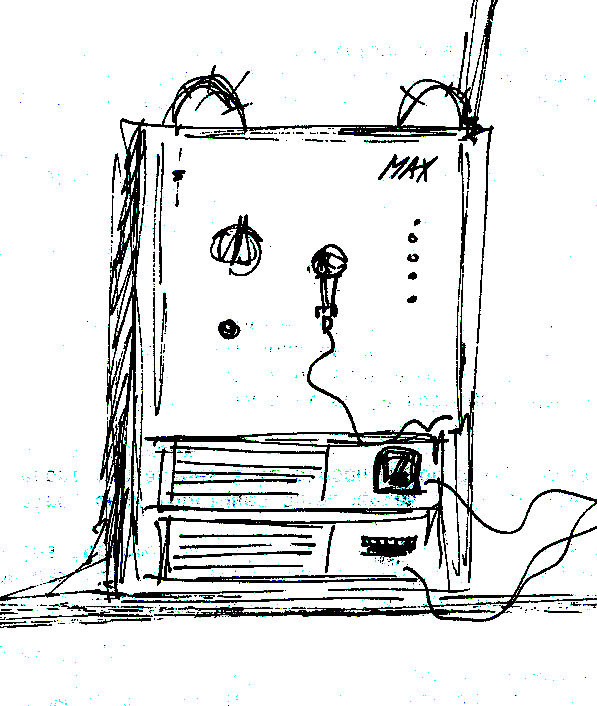
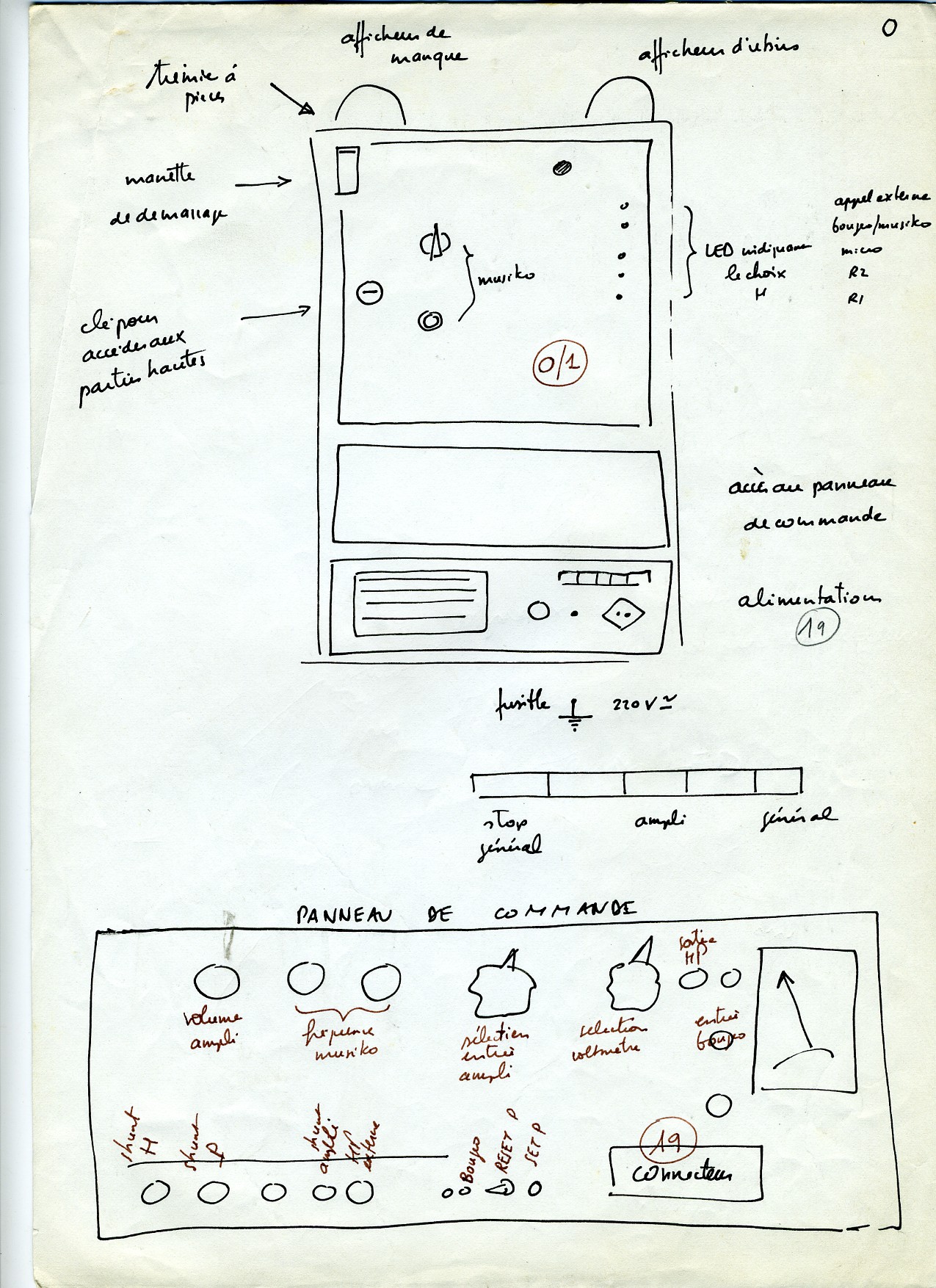
Pour la musique, l' « instrument » consiste en un multivibrateur dont on fait varier la fréquence par un potentiomètre et qui peut fonctionner quand on appuie sur un bouton, comme l'indique la figure 2 (potentiomètre et bouton sur sur la face avant de Max). Pour la mesure de H, on s'est ici passé du monostable et l'on charge directement le condensateur.
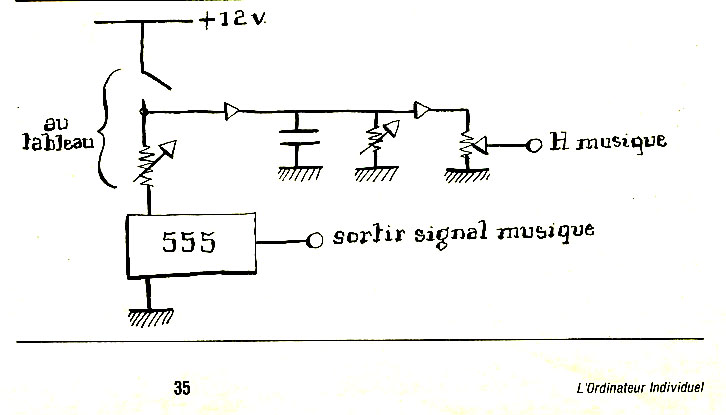
Figure 2. H-mètre et signal pour la "musique". Noter un dispositif analogue pour le réglage de H.
Les perturbations extérieures sont déclenchées par un interrupteur (accéléromètre sommaire) monté sur la porte de l'atelier, et fonctionnant comme le bouton de l'instruemnt de musique (voir figure 5).
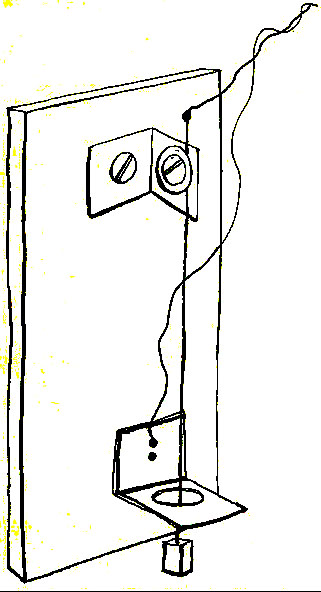
Figure 5. Accéléromètre rudimentaire pour détecter les chocs extérieurs. Un petit morceau de plomb est replié et serré sur un fil d'acier.
Les tensions représentant les valeurs de H pour les différentes activités sont alors conduites à une batterie de comparateurs (LM339 de National), qui commande des relatis et envoie vers l'amplificateur le signal correspondant à l'activité la plus « variée » (voir figure 4).
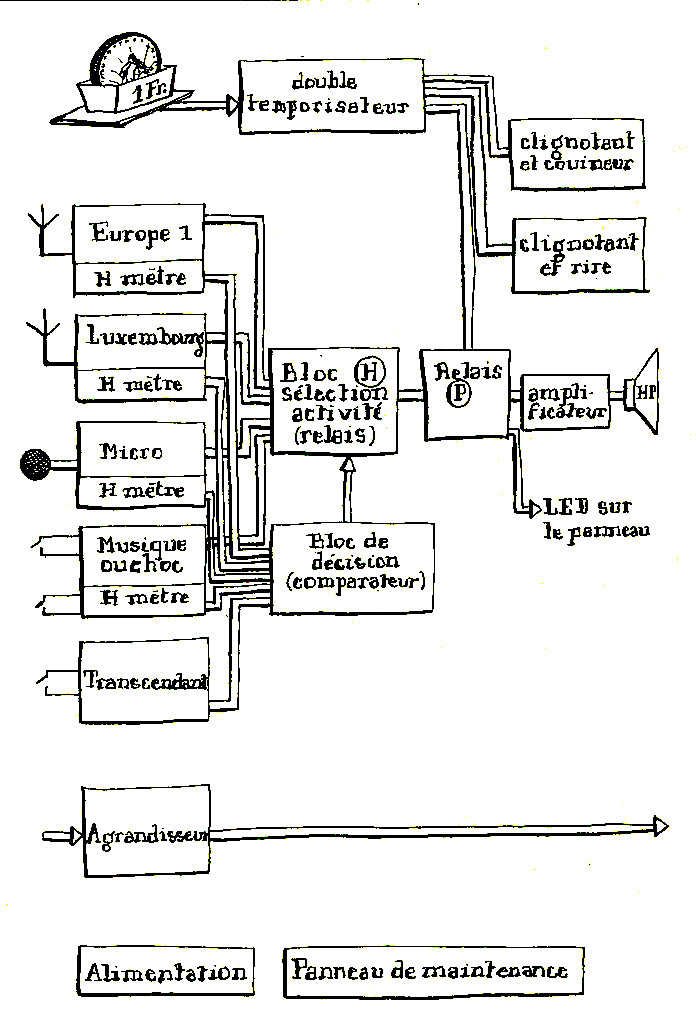
Figure 4. Schéma organique. Les rectangles correspondent chacun à une (parfois plusieurs) plaquette câblée séparément. Le panneau de maintenance permet de shunter les fonctions H et/ou P, pour tester séparément les signaux et de mesurer les fonctions H.
On modifie aisément les « préférences » de Max par division de tension au moyen d'un simple potentiomètre (voir figure 3). La « transcendance », elle, intervient directement au niveau des relais, sans passer par une mesure de H.
La réalisation concrète de Max a été fortement marquée par son insertion dans la vie personnelle de l'auteur. C'est un peu comme l'un de ses enfants, aux dépens duquel il a appris quelques rudiemnts d'électronique. Il a été réalisé avec des composants linéaires (à l'exception des comparateurs et relais), parce que cela permetait une acquisition progressive des composants et une construction très modulaire, alors qu'une solutiondigitale a paru d'emblée trop coûteuse (en tous cas à l'époque), et exigeait des techniques de réalidation qui semblaient plus difficiles pour un débutant.
Une construction très modulaire (par petites plaquettes) a été choisie pour
permettre :
- la réalidation, la mise au point, les dépannages et les
modifications module par module ;
- le ré-emploi de petits dispositifs
réalisés antérieuremnet par l'auteur, en particulier un clignotant qui lui donna
sa première joie d'électronicien amateur (*)
- l'ajout éventuel de nouveaux
modules.
(*) On remarquera aussi sur la figure 4 un module "agrandisseur" utilisé pour le laboratoire photo de l'auteur. Resté étranger du reste des fonctions de Max, il a servi à tester les avantages et les inconvénients de l' "intégration".
En outre, un tableau de commande et de maintenance a été construit pour :
- faciliter le diagnostic et le maintenance en isolant les différentes
fonctions (le caractère très débutant de l'auteur exigeait ce genre de
précaution pour réaliser un système qui a tout de même une certaine
complexité),
utiliser le cas échéant Max pour d'autres applications
(alimentations, génération de fonctions).
Ces diverses dispositions ont conduit à une réalisation sensiblement plus compliquée qu'il ne serait strictemnet nécessaire pour la simple implémentation des fonctions décrites. A fortiori, il n'est pa question d'optimisation dans l'emploi des composants. Max est ainsi un objet « historique », témoin des hésitations et des erreurs de son auteur. C'est bien son « enfant », avec les limites et les charmes de cette génétique concrète.
Max est capable de toutes sortes d'activités
D'autres automates à maximisation de variété pourraient ête construits.
En gardant les fonctions P et H séparées, on pourrait :
- augmenter le
nombre des activités possibles, et en particulier doter Max de la mobilité
spatiale (en tout état de cause assez limitée pour tous les robots actuellemnt
connus, et assez coûteuse pour le constructeur amateur) ;
- utiliser des
algorithmes plus élaborés de mesure de la variété que le H-mètre décrit ici ;
par exemple, on pourrait aller vers la reconnaissance des formes, etc. ;
-
remplacer la fonction P actuelle, simple temporisation arbitrairement fixée, par
l'appréciation réelle d'une espérance de vie du système ; par exemple, l'entrée
d'une pièce de monnaie déclencherait la charge d'une batterie d'accumulateurs
pendant une minute, et le système fonctionnerait ensuite tant que la batterie
resterait suffisamment chargée. Ce point serait facile à réaliser avec une
batterie au plomb, dont la tension est liée à la charge par une fonction facile
à utiliser.
En séparant moins brutalement les fonctions H et P, on pourrait :
-
moduler le degré d'activité en fonction de l'espérance de vie : au fur et à
mesure de la décharge de la batterie, par exemple, Max réduirait son champ
d'activité à celles qui consomment peu d'énergie ;
- donner à Max une
structure hiérarchisée, ou si l'on prèfère, construire une société hiérarchisée
d'automates de type Max ; techniquement, cela n'est pas difficile : il suffit
que les subalternes aient un systèmes de préférences (pondération des H
d'activités) qui les fassent obéir aux automates de niveaux supérieurs ; comme
exemple pratique, on peut suggérer, dans une habitation, un système de sécurité
et de gestion organisé pièce par pièce, avec un pilotage global par un Max
général.
Des développements de quelque envergure poussent bien entendu à des solutions digitales, avec un microprocesseur ou un micro-ordinateur pour calculer de la manière la plus élaborée et la plus explicite possible la maximisation de la fonction L. Cependant, un tel automate n'est intéressant que s'il reçoit un grand nombre d'informations de l'extérieur et peut exhiber des comportements variés. Il faudra donc, en toute hypothèse, construire autour de l'ordinateur d'assez substantiels modules analogique (capteurs, tuners, panneaux de commande, etc.).
Finalement, Max ne fait qu'expliciter un principe de maximisation de néguentropie qui semble inhérent à tout système, mais reste implicite sauf dans les systèmes« conscients ».
Son intérêt est peut-être surtout de retourner des schémas mentaux hérités d'une longue tradition. L'automate y est toujours présenté comme un esclave, comme un « système asservi » dont « il ne sort que ce qu'on y met ». Ne pourrait-on passer à l'idée de collaborateurs autonomes, libérés du détail de nos commandes élémentares, et par là-même nous libérant de quelques soucis et de quelques complexes ?
Mais alors, le coopérateur sera-t-il docile ? Ne va-t-on pas vers une révolte des robots ? C'est bien justemnet ce que l'on voudrait éviter : ne construisons plus d'esclaves qui menacent toujours de se révolter, mais faisons naître des collaborateurs qui... participent.
Pierre Berger
Notes préalables
Max l'égoïste
Principe et réalisation sommaire d'un robot à maximisation d'espérance de néguentropie
Pierre Berger, 10/78
On pourrait poser le principe suivant qui serait valable pour tous les systèmes. Ce principe est trivial pour certaines catégories de systèmes, mais reste à valider pour d'autres. Ce principe est :
Tout système tend à maximiser l'intégrale de son espérance de néguentropie, ce que l'on peut exprimer, moyennant quelque simplification, par la formule :
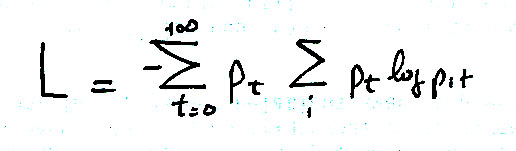
p t est la probabilité d'existence du système à l'instant t (on ne prend que les instants futurs), elle exprime l'espérance de vie,
pit est la probabilité pour le système d'être dans l'état i à l'instant t ; la deuxième sommation exprime l'espérance de néguentropie à l'instant futur t.
Cette formule essaie d'exprimer que la liberté, sinon l'être même, est à la fois possibilité d'exister, de survivre (premier membre, que nous appellerons avec quelque abus de langage "fonction P") et possibilité de choix entre différentes possibilités, cette possibilité de choix étant d'autant plus grande que les choix possibles sont nombreux (valeurs nombreuses de i) et que l'on est peu contraint de prendre plutôt l'un que l'autre (à la limite, tous pit égaux).
Faute de pouvoir valider ce principe, nous avons tenté de le faire apprécier en construisant, artisanalement, un robot maximisant concrètement une fonction ressemblant à L. L'appréciation "absolue" d'une telle expression est impossible, car elle suppose un choix sur la "différence" entre deux états. Aussi avons-nous choisi une modélisation relativement simpliste, mais qu'on espère suffisante pour montrer qu'un système peut avoir un comportement cohérent, et éventuellement utile, sans pour autant être "asservi" mais bien au contraire en suivant "égoïstement" sa propre optimisation.
Description fonctionnelle (figure 1)

Nous avons décomposé L en deux fonctions, P (existence) et H (néguentropie), traitées séparément.
Fonction P. Pour exister, Max doit gagner de l'argent, et le fait en mendiant. Quand un passant met une pièce (la présence d'un passant est détectée par les variations d'éclairement d'une cellule photoélectrique), Max considère d'abord que sa fonction P est saturée (et même sa fonction L entière) et se paye quelques secondes de bon temps aux dépens du payeur (rire et affichage d'un message "encore un pigeon"). Ensuite, il prend son activité normale pendant une dizaine de minutes, après quoi il recommence à mendier (il a faim).
Fonction H. Pendant sa période normale d'activité (entre faim et ubris), Max choisit la plus intéressante des occupations qui lui sont possibles. Faute de mieux, il écoute la radio, en choisissant celle qui lui semble la plus variée. Il préfère, quand cela se présente, écouter un interlocuteur qui lui parle dans un micro. Mieux encore, il adore qu'on l'utilise pour faire de la musique. Cependant, il interrompt son activité soit en présence d'un danger (coup donné dans la porte de l'atelier), auquel cas il proteste bruyamment, soit en fonction d'un improbable mais irrésistible appel de la transcendance (1)
(1) En l'occurrence, la transcendance est représentée par l'épouse de l'auteur, qui dispose dans la cuise d'un bouton adéquat destiné à sortir le génial et phallocrate père de Max de son atelier chéri à l'heure du dîner.
Description organique (figure 2)
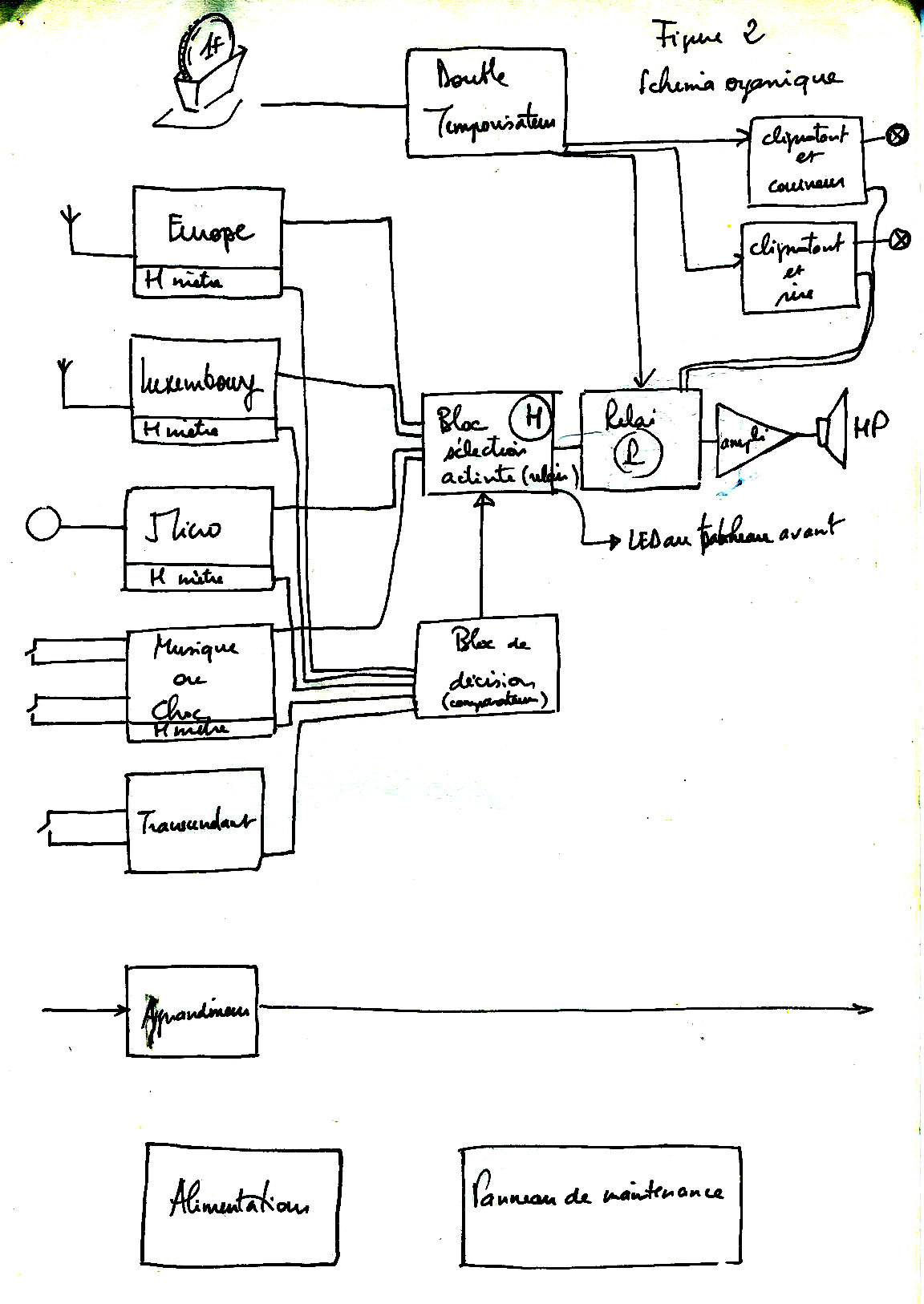
La fonction P est matérialisée par un double temporisateur (555) commandant des relais, et déclenché par l'entrée d'une pièce.
Pour la fonction H, on a chercher une solution simple exprimant à tout instant, sous forme d'une tension continue, la variété de chaque activité possible. Ce sont les "H.mètres" (figure 3).
Pour chaque activité, on commence par expliciter une variable exprimant l'évolution du phénomène concerné. Pour les deux radios et le micro, cette variable est donnée par un Vu-mètre. Chaque modification significative (... à creuser) de cette variable, est considérée comme un événement et déclenche une impulsion qui charge un condensateur. Ce dernier se décharge ensuite peu à peu à travers une résistance (ajustable).
La tension aux bornes de ce condensateur donne donc une sorte de lissage du nombre d'événements survenus récemment sur cette activité. On atteint un seuil si on a une suite d'événements rapprochés et l'on revient progressivement vers 0 quand "rien ne se passe".
Pour la musique, l' "instrument" est un multivibrateur (555 monté en astable) dont on fait varier la fréquence par un potentiomètre et qui peut fonctionner quand on appuie sur un bouton (potentiomètre et bouton sont sur la face avant de Max). Figure 4. Pour la mesure de H, on s'est ici passé du 55, et l'on charge directement le condensateur.
Les perturbations extérieures sont déclenchées par un interrupteur (accéléromètre sommaire) monté sur la porte de l'atelier, et fonctionnant comme le bouton de l'instrument de musique (figure 5).
Les tensions représentant les valeurs de H pour les différentes activités sont alors conduites à une batterie de comparateurs (LM 339 de National), qui commande les relais, et envoie vers l'amplificateur le signal correspondant à l'activité la plus "variée" (figure 2). On modifie aisément les "préférences" de Max par division de tension au moyen d'un simple potentiomètre (figure 3).
Description génétique
La réalisation concrète de Max a été fortement marquée par son insertion dans la vie personnelle de l'auteur. C'est un peu son quatrième enfant (2), aux dépens duquel il a appris quelques rudiments d'électronique. Il a été réalisé avec des composants linéaires (à l'exception des comparateurs et relais), parce que cela permettait une acquisition progressive des composants et une construction très modulaire, alors qu'une solution digitale a paru d'emblée trop coûteuse (en tous cas à l'époque), et exiger des techniques de réalisation plus difficiles pour un débutant.
(2) Les trois autre vont bien, merci.
Une construction très modulaire, (par petite plaquettes) a été choisie pour
permettre :
- la réalisation, la mise au point, les dépannages et les
modifications module par module,
- le ré-emploi de petits dispositifs
réalisés antérieurement par l'auteur (en particulier un clignotant qui lui donna
sa première joie d'électronicien amateur), (3)
- l'ouverture formelle vers de
nouveaux modules.
(3) On remarquera aussi sur la figure 2 un module "agrandisseur" utilisé pour le laboratoire photo de l'auteur. Resté étranger au reste des fonctionnalités de Max, il a servi à tester les avantages et inconvénients de l' "intégration".
En outre, un tableau de commande et de maintenance a été construit pour :
- faciliter les diagnostic et la maintenance en isolant les différentes fonctions (le caractère très débutant de l'auteur exigeait ce genre de précaution pour réaliser un système qui a tout de même une certaine complexité),
- utiliser le cas échéant Max pour d'autres applications (alimentation, génération de fonctions).
Ces différentes dispositions ont conduit à une réalisation sensiblement plus compliquée qu'il ne serait strictement nécessaire pour la simple implémentation des fonctions de Max, sans parler d'une optimisation plus précise dans l'emploi des composants.
Mas est donc ainsi un objet "historique", porteur des évolution, des hésitations et des erreurs de son auteur, ce qui lui donne plus de charme encore pour ledit auteur.
Développements possibles
D'autres Max, plus développés, pourraient être construits :
-
multiplication du nombre des activités possibles (augmentation de H) ;
-
critères plus subtils de sélection des activités ;
- perfectionnement de la
fonction P ; par exemple, au lieu d'être un temps arbitrairement fixé, elle
pourrait exprimer la décharge d'une batterie ;
- en modulant les activités
possibles en fonction de P, par exemple en limitant progressivement les
activités fortement consommatrices d'énergie;
- par des politiques plus
subtiles de sélection des passants, assurant de meilleures rentrées financières
;
- par l'acquisition de la mobilité spatiale (en tout état de cause assez
limitée pour tous les robots actuellement connus) ;
- par des combinaisons
plus élaborées de P et de H ;
- par une explicitation formelle du calcul de
L, avec des algorithmes de décision et de prévision, etc. Une solution digitale
sera bien entendu indispensable.
Ces perfectionnements sont pratiquement indéfinis. D'ailleurs, on peut construire des hiérarchies de Max (il suffit que les Max subalternes aient un système de préférences approprié).
Finalement, Max ne fait qu'expliciter un peu mieux un principe inhérent à tout système. Il vise surtout à retourner les schémas mentaux traditionnels : passer des automates esclaves, des "systèmes asservis" à l'idée de collaborateurs relativement autonomes, libérés du détail de nos commandes, et nous libérant par là même de quelques soucis et de quelques complexes.
Mais lors, le coopérateur sera-t-il docile ? Ne va-t-on pas vers une révolte des robots ? C'set bien justement ce que l'on voudrait éviter : ne construisons plus d'esclaves qui se révoltent, mais des collaborateurs qui ... participent !