 Figure 1
Figure 1 Leonardo Torres y Quevedo
Membre de l'Adadémie royale des sciences de Madrid.
Revue Générale des Sciences, 15 novembre 1915 (26eme année, tome 26)
NOTE DE L'EDITEUR .
Sur le site de Gérard Verroust, nous trouvons le texte suivant : "Leonardo Torres y Quevedo (1852-1936), ingénieur des Ponts et Chaussées, logicien, automaticien, il fut l'auteur d'innombrables inventions et réalisations (ponts suspendus, téléfériques, funiculaires, calculateurs analogiques, télécommandes par voie hertzienne, ballons dirigeables, etc.) Il réalisa à partir de 1911 des jeux d'échecs électromécaniques qui gagnaient des fins de partie ultra-simples (une tour et un roi) face à un joueur." |
La dénomination d'automate est appliquée souvent à une machine qui imite l'apparence et les mouvements d'un homme ou d'un animal. Il s'agit généralement alors d'un mécanisme qui porte en lui-même la source d'énergie qui le fait marcher (un ressort, par exemple) et qui exécute certains actes, toujours les mêmes, sans subir aucune influence du dehors.
Il y a une autre sorte d'automates qui offrent un intérêt beaucoup plus considérable : ceux qui imitent, non pas les simples gestes, mais les actes réfléchis de l'homme, et qui peuvent parfois le remplacer.
La torpille automobile, qui sait manoeuvrer pour arriver à son but ; la balance qui pèse les pièces de monnaie pour choisir celles qui ont le poids légal, et mille autres appareils très connus peuvent servir comme exemples d'automates de cette dernière espèce.
On en trouve d'autres beaucoup plus intéressants dans les usines. Le progrès industriel se réalise principalement en substituant au travail de l'homme le travail de la machine ; petit à petit, on arrive à exécuter mécaniquement la plupart des opérations qui étaient primitivement exécutées par des ouvriers, et l'on dit qu'une fabrication a été automatisée quand elle peut être réalisée automatiquement par les machines.
Il conviendra, avant d'aller plus loin, pour bien préciser l'objet de cet article, de diviser les automates en deux groupes, suivant que le rôle des circonstances qui doivent régler leur action s'exerce d'une manière continue, ou qu'au contraire il intervient brusquement, par intermittences.
Nous pourrons prendre comme exemple du premier groupe la torpille automobile. Le gouvernail horizontal, destiné à la maintenir à une profondeur à peu près invariable, est manoeuvré par l'action d'un réservoir à air comprimé, qui fait équilibre à la pression de l'eau, et par un pendule. Les variations d'altitude produisent le déplacement d'une paroi qui sépare le réservoir à air de l'eau environnante ; les variations d'inclinaison produisent le déplacement, par rapport à la torpille, du pendule qui reste vertical ; le gouvernail horizontal est relié au pendule et à la paroi du réservoir par des mécanismes qui l'obligent à prendre à chaque moment la position qu'il convient pour ramener la torpille à la profondeur voulue.
Il s'agit donc d'établir entre trois mobiles : le pendule, la paroi et le gouvernail, des liaisons mécaniques invariables. C'est là un problème du même genre que tous ceux qu'on étudie dans la Cinématique appliquée à la construction des machines. Son étude n'offre pas ici un intérêt spécial.
Dans les automates du second groupe, l'automatisme ne s'obtient nullement par des liaisons mécaniques permanentes ; il a pour but, au contraire, d'altérer brusquement ces liaisons quand les circonstances l'exigent ; il faudra que l'automate - par une manoeuvre très rapide en général - embraye ou débraye une poulie, ouvre ou ferme une soupape, etc. Il faut, en somme, que l'automate intervienne à un moment donné, pour altérer brusquement la marche des machines, qui seront, pour ainsi dire, dirigées par lui.
On peut trouver dans les descriptions de machines de très nombreux exemples de ces interventions brusques, mais il est évident que l'étude de cette forme de l'automatisation n'appartient pas à la Cinématique. Aussi n'a-t-elle jamais été systématiquement étudiée, à ma connaissance.
On devrait, je pense, faire cette étude dans un chapitre spécial de la théorie des machines qui porterait le nom d'Automatique.
Il devrait étudier les moyens de construire des automates doués d'une vie de relation plus ou moins compliquée.
Ces automates auront des sens : des thermomètres, des boussoles, des dynamomètres, des manomètres..., des appareils sensibles aux circonstances qui doivent avoir une influence sur leur marche.
L'impression reçue par chacun de ces appareils se traduit en général par un mouvement, par exemple le déplacement d'une aiguille sur un limbe gradué.
Ces automates auront des membres ; les machines ou les appareils capables d'exécuter les opérations dont ils seront chargés. La commande peut être faite par quelque moyen très simple, même s'il s'agit d'opérations compliquées ; cela se voit dans certaines horloges qui, par un déclanchement analogue à celui d'un réveil-matin, mettent en marche des marionnettes qu exécutent divers mouvements.
Ces automates auront l'énergie nécessaire : les accumulateurs, les courants d'eau, les réservoirs à air comprimé qui fourniront aux moteurs l'aliment nécessaire pour marcher et faire marcher les machines destinées à exécuter les opérations voulues.
Il faut en outre - et c'est là principalement le but de l'Automatique - que les automates soient capables de discernement; qu'ils puissent à chaque moment, en tenant compte des impressions qu'ils reçoivent, ou même de celles qu'ils ont reçues auparavant, commander l'opération voulue. Il faut que les automates imitent les êtres vivants en réglant leurs actes d'après leurs impressions, en adaptant leur conduite aux circonstances.
La construction des appareils qui jouent le rôle des sens n'offre en théorie aucune difficulté. On invente chaque jour de nouveaux appareils destinés à mesurer et enregistrer les variations des éléments qui interviennent dans les phénomènes du monde physique celle qui ne peuvent pas être mesurées aujourd'hui seront mesurées demain, ou du moins - et je crois exprimer ici une opinion généralement admise - il n'y a aucune raison pour affirmer qu'il n'en sera pas ainsi.
On peut faire la même remarque quand on se demande s'il sera possible de construire un automate qui, pour déterminer sa manière d'agir, pèse les circonstances qui l'environnent. On estime, je crois, que la chose peut se faire seulement dans quelques cas très simples ; on pense qu'il est possible d'automatiser les opérations mécaniques, purement manuelles, d'un ouvrier, tandis qu'au contraire les opérations qui exigent l'intervention des facultés mentales ne pourront jamais être exécutées mécaniquement.
Cette distinction n'a aucune valeur, car, sauf dans les cas des mouvements réflexes, dont nous n'avons pas à nous occuper ici, dans toutes les actions humaines interviennent les facultés mentales.
Je tâcherai dans cet article de faire voir - en me plaçant à un point de vue purement théorique - qu'il est toujours possible de construire un automate dont tous les actes dépendent de certaines circonstances plus ou moins nombreuses, suivant des règles qu'on peut imposer arbitrairement au moment de la construction.
Ces règles devront être évidemment telles, qu'elles suffisent pour déterminer en toute occasion, sans aucune incertitude, la conduite de l'automate.
Ce problème pourrait être résolu par mille chemins différents, mais - pour me faire plus facilement comprendre - au lieu de m'en tenir à de pures abstractions, j'indiquerai une méthode électro-mécanique qui peut donner, ce me semble, la solution générale du problème.
Les schémas qui figurent dans cet article n'ont nullement la prétention de représenter des solutions pratiques ; nous n'avons nullement à nous préoccuper des difficultés ou plutôt des impossibilités qu'offrirait leur réalisation ; ils ont été tracés pour rendre plus claires les explications théoriques, et c'est à ce point de vue seulement qu'ils pourront être utiles
Le principe de la méthode électro-mécanique que je vais exposer est extrêmement simple.
Nous avons admis tantôt que la variation de chacune des circonstances qui interviennent dans la direction de l'automate sera représentée par un certain déplacement ; nous pourrions supposer que la pièce qui se déplace est un commutateur : au lieu d'un index qui parcourt une échelle graduée, nous aurons un balai qui parcourt une ligne de plots et entre en contact avec chacun d'eux successivement.
S'il y a a n commutateurs, et si nous désignons par P1, P2, P3, ... Pn le nombre de plots conjugués avec chacun d'eux, le nombre des positions du système à considérer seront le produit P1xP2xP2x...xPn.
A chacune de ces positions correspondra, d'après ce que nous venons de voir, une certaine opération qui doit être déclanchée par quelque moyen très simple. Puisqu'il s'agit d'une machine électro-mécanique, le plus simple sera de faire que le déclanchement se produise par l'action d'un aimant qui attire son armature. Il faudra qu'il y ait un électro-aimant pour chaque position du système et, pour réaliser l'automatisation, il suffira d'établir les connexions électriques de telle manière que chaque électro-aimant entre en activité au moment où se produit la position correspondante des commutateurs.
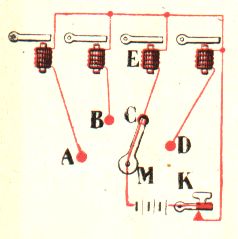
Dans le cas le plus simple - quand la marche de l'automate dépend d'un seul élément - la solution est celle qui a été indiquée schématiquement par la figure 1.
Figure 1
Les variations de cet élément sont représentées par les mouvements du commutateur M qui tourne et entre successivement en contact avec chacun des plots A,B,C,D. Actuellement le courant passe par l'électro-aimant E ; c'est donc l'opération déclanchée par lui qui sera réalisée, si le manipulateur K rétablit la communication en ce moment. Du reste, ce manipulateur peut être manoeuvré automatiquement quand une certaine circonstance se produit ; par exemple à une heure déterminée.
On pourra parfois trouver des difficultés à la réalisation d'un tel appareil, mais sa possibilité théorique (dont nous nous occupons exclusivement) ne fait pas l'ombre d'un doute.
Elle est également évidente dans le cas le plus général, quand il faut considérer plusieurs commutateurs au lieu d'un seul.
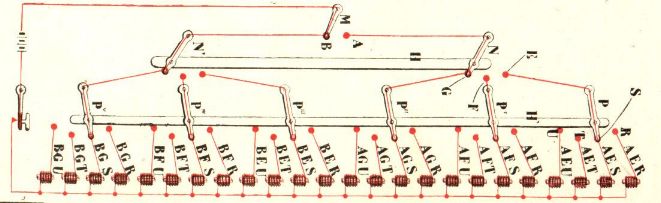
Figure 2
Dans le schéma de la figure 2, il y a trois commutateurs : M,N,P.
Le second entraîne les cinq commutateurs Pi, Pii, Piii, Piv, Pv.
M peut prendre les deux positions A,B.
N peut prendre les trois positons E,F,G.
P peut prendre les quatre positions R,S,T,U.
Le système admet en tout vingt-quatre positions différentes, et à chaque position correspond un électro-aimant, qui entre en activité dès que le courant est établi.
On peut augmenter à volonté le nombre des commutateurs et le nombre des plots conjugués avec chacun d'eux. Autrement dit, on peut augmenter indéfiniment le nombre de cas particuliers que l'automate aura à considérer pour régler ses actions ; on peut compliquer à plaisir sa vie de relation.
Et cela sans la moindre difficulté théorique. Il n'y a aucune différence essentielle entre la machine la plus simple et l'automate le plus compliqué ; l'un comme l'autre se réduisent à un système matériel soumis aux lois physiques qui dérivent de sa composition ; mais, quand ces lois sont compliquées, quand il faut faire un raisonnement important pour déduire de ces lois les manoeuvres correspondantes, la machine qui les exécuterait aurait l'air de faire elle-même le raisonnement et c'est là ce qui égare généralement le jugement des personnes qui s'occupent de cette question.
Je rappellerai comme exemple les idées de Descartes sur ce point (Discours sur la Méthode, 5e partie).
Il admet sans difficulté qu'on puisse considérer le corps d'un animal "comme une machine qui, ayant été faite des mains de Dieu, est incomparablement mieux ordonnée et a en soi des mouvements plus admirables qu'aucune de celles qui peuvent être inventées par les hommes".
Il ajoute que, "s'il y avait de telles machines qui eussent les organes et la figure extérieure d'un singe ou de quelque autre animal sans raison, nous n'aurions aucun moyen pour reconnaître qu'elles ne seraient pas en tout de même nature que ces animaux".
Mais Descartes refuse, même à la toute-puissance divine, la faculté de construire des automates capables d'imiter les actions humaines qui sont guidées par la raison. Il juge métaphysiquement impossible, par exemple, qu'un automate puisse user de paroles ni d'autres signes "pour répondre au sens de tout ce qui se dira en sa présence, ainsi que les hommes les plus hébétés peuvent faire".
Il admet volontiers que l'automate puisse parler, mais il ne conçoit pas qu'il puisse parler raisonnablement.
Imaginons une machine analogue à celle qui est représentée par le schéma de la figure 2, mais dans laquelle, au lieu de trois commutateurs, il y en ait des milliers ou des millions, s'il en faut, et que, au lieu de trois ou quatre positions différentes, chacun des commutateurs ait une position correspondant à chacun des signes d'écritures (lettres, chiffres, signes d'orthographe, etc.).
On comprend parfaitement qu'on peut, en se servant de ces commutateurs, écrire une phrase quelconque, ou même un discours plus ou moins long ; cela dépend du nombre des commutateurs dont on disposera.
A chaque discours correspondra donc une positon du système et par conséquent un électro-aimant. Nous pouvons supposer que celui-ci déclanche un phonographe sur lequel est inscrite la réponse à la question qui a provoqué son déclanchement, et nous obtenons ainsi un automate capale de discuter de omni re scibili
Certes, l'étude préalable de toutes les questions possibles, la rédaction de la réponse à chacune d'elles, et finalement, la construction d'une telle machine, ne seraient pas des choses commodes, mais elles ne seraient pas beaucoèp plus difficiles que la construction d'un singe ou d'un autre animal assez bien imité pour qu'il pût être classé par les naturalistes parmi les espèces vivantes.
Il n'y a pas entre les deux cas la différence que voyait Descartes. Il a été égaré par cette idée que l'automate, pour répondre raisonnablement, serait obligé de faire lui-même le raisonnement, tantdis que dans ce cas, comme dans tous les autres, c'est son constructeur qui raisonnerait pour lui.
Je crois avoir montré par tout ce qui précède qu'on peut aisément concevoir pour un automate la possibilité théorique de déterminer son action à un moment donné en pesant toutes les circonstances qu'il doit prendre en considération pour réaliser le travail dont il est chargé.
On peut de même concevoir un automate qui agisse avec une finalité : un automate qui réalise une série d'action en vue d'obtenir un résultat déterminé.
La question est trop compliquée pour qu'il me soit possible de la traiter d'une manière abstraite; je risquerais fort de ne pas m'exprimer clairement.
L'exemple à choisir pour illustrer mes explications est tout indiqué : les machines analytiques ( J'emprunte ce nom à Babbage. Peut-être vaudrait-il mieux les appeler machines arithmétiques).
Les autres qu'on pourrait prendre présenteraient des difficultés d'exposition considérables, dues principalement à la nécessité de représenter (ne fût-ce que schématiquement) les sens et les membres de l'automate : les appareils destinés à le mettre en rapport avec le milieu ambiant, et les opérateurs qui devront exécuter des opérations plus ou moins compliquées.
Ces inconvénients n'existent pas dans les machines à calculer. Chacune des valeurs qui doivent intervenir dans les calculs, soit les données, soit les résultat provisoires de ses opérations successives, sera représentée dans nos schémas par le déplacement d'un mobile, comme dans les figures 1 et 2.
Calculer une valeur sera donc, pour l'automate, déplacer le mobile correspondant, pour l'amener à la position voulue, et cette opération - répétée autant de fois qu'il sera nécessaire - est la seule que l'automate ait à exécuter.
En outre, ces machines nous offriront, je pense, le cas le plus général qu'on puisse examiner, et toutes les conclusions qu'on tirera de son étude théorique seront facilement généralisées par le lecteur.
Une machine analytique, telle que je l'entends ici, doit exécuter n'importe quels calculs, pour si compliqués qu'ils soient, dans le secours de personne. On lui donnera une formule et un ou plusieurs systèmes de valeurs particulières des variables indépendantes, et elle devra calculer et inscrire toutes les valeurs des fonctions explicites ou implicites correspondantes définies par la formule. Elle devra suivre une marche analogue à celle d'un calculateur : exécuter nécessairement une à une les opérations indiquées, en prenant les résultats des unes comme facteurs ou argument des suivantes, jusqu'à l'obtention des résultats définitifs.
Avant d'entrer dans la description de l'ensemble, je décrirai les appareils destinés à exécuter chacune des opérations élémentaires que l'automate devra exécuter pour mener à bien ses calculs :
a) Enregistrer une valeur particulière en déplaçant le mobile correspondant.
La règle A (fig.3) peut glisser entre la butée B et le ressort B' qui exerce une pression modérée et elle est guidée en outre par l'un des rouleaux Q,Q' qui tournent dans le sens des flèches. Elle porte deux plots P,P', conjugués avec sept balais r'1, r'2,...r'7, et un balai R, conjugué avec sept plots r1, r2,...r7.
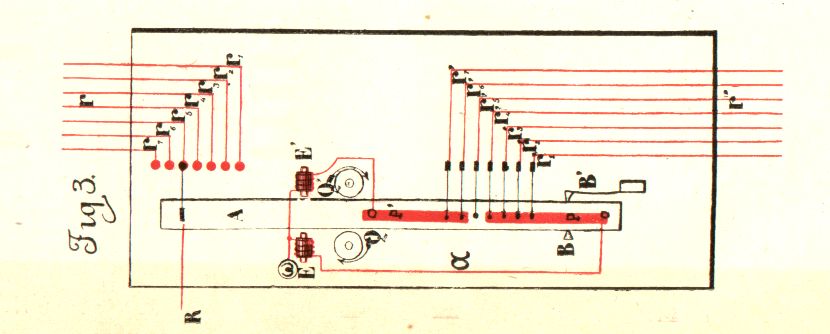
Figure 3
Les deux rouleaux tournent constamment dans le sens indiqué par leurs flèches, mais leur séparation est un peu plus grande que la largeur de la règle A, de sorte que celle-ci n'est pas entraînée ; elle est retenue par le frottement entre B et B'.
Supposons qu'on rende positif (Nous dirons qu'un conducteur est positif quand il est en communication avec le pôle positif d'une source d'électricité) le balai r'1.
Si ce balai est en contact avec le plot P, il s'établira un circuit (*) qui passe par l'électro-aimant E, lequel attirera la règle A qui viendra s'appuyer sur le rouleau Q ; le frottement qui se produit alors au point de tangence est suffisant pour entraîner la règle jusqu'au moment où le balai r'1 vient en contact avec l'espace qui sépare les deux plots et coupe le courant, en laissant ainsi inactif l'électro-aimant E.
(*) Nous supposerons dans ces desssins : 1° que les lignes rouges -telles que α -indiquent que les deux pièces auxquelles elles aboutissent sont constamment en communication électrique, mais elles ne représentent pas un conducteur de forme invariable. Ainsi, la ligne α veut dire que le fil de l'électro-aimant E se touve en contact ininterrompu avec le plot P, par un balai, par un fil flexible, ou par tout autre moyen qui ne gène en rien les mouvements de la règle A : 2° qu'un cercle avec un diamètre horizontal, tel que ω, représente un pôle négatif, tandis qu'un cercle analogue avec deux diamètres perpendiculaires représente un pôle positif (voir fig.6).
Si le balai r'1se trouve en contact avec le plot P', les choses se passeront d'une manière analogue ; c'est l'électro-aimant E' qui deviendra actif et la règle A, entraînée par le rouleau Q', marchera vers le haut, jusqu'à ce que le balai r'1 vienne se placer entre les deux plots P, P'.
S'il se trouve dans cette position, au moment où il est rendu positif, la règle A ne bougera pas.
Dans tous les cas, par le fait d'avoir rendu positif le balai r'1, nous avons amené la règle à cette position, et, par conséquent, nous avons établi le contact entre le balai R et le conducteur r1. Nous dirons alors que nous avons enregistré dans cet appareil la valeur R1.
b) Exécuter une des quatre opérations de l'arithmétique : addition, soustraction, multiplication ou division.
Au point de vue de la construction, il n'y a aucune différence essentielle entre ces quatre opérations ; j'ai représenté, pour fixer les idées, dans le schéma 4 l'appareil qui exécute la multiplication.
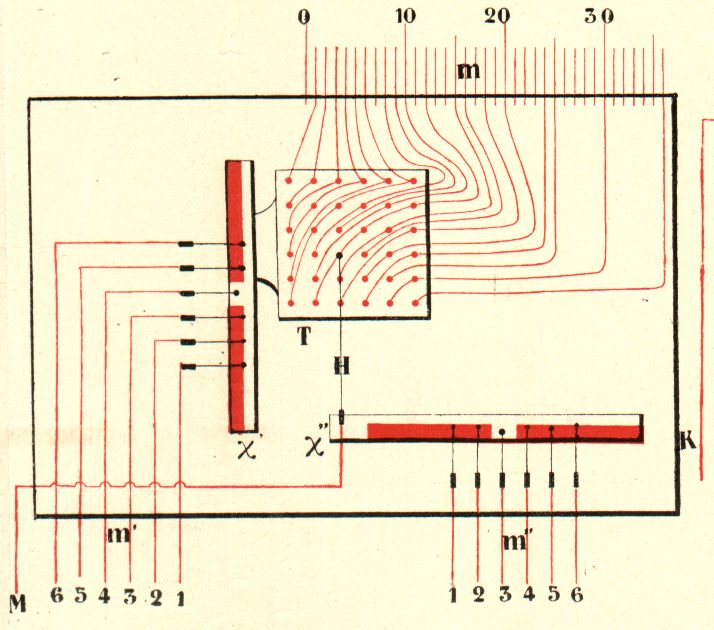
Figure 4
Les facteurs sont représentés par les règles x', x", et le produit par le faisceau m.
Chacune des règles peut être manoeuvrée, en rendant positif l'un ou l'autre des balais qui sont conjugués avec elle, par un dispositif analogue à celui que nous venons de décrire ; mais pour simplifier le dessin, on y a supprimé les butées, les électro-aimants et les rouleaux.
La règle x' entraîne dans son mouvement un tableau T avec plusieurs plots, et la règle x" porte un balai toujours actif, dont l'extrémité entre en contact avec l'un ou l'autre de ces plots, suivant la position de x' et de x".
En rendant actifs - soit en même temps,, soit successivement - un balai du groupe m' et un autre du groupe m", on déplacera comme il a été expliqué, les règles x' et x", de manière à représenter telles valeurs particulières des facteurs qu'on voudra. On voit représentées sur le dessin les valeurs 4 pour la règle x' et 3 pour la règle x".
Par ces manoeuvres on amènera l'extrémité du balai H en contact avec un plot déterminé et par conséquent avec l'un des conducteurs du groupe m.
Or l'appareil est construit de sorte que la valeur représentée par ce conducteur est le produit des deux quantités enregistrées dans les règles x', x".
Il suffit donc d'inscrire les facteurs pour mettre en contact le conducteur M avec le conducteur du faisceau m qui correspond au produit.
La construction se comprend sans peine. Le tableau T est en somme l'abaque de la multiplication dans lequel les courges sont matérialisées par les conducteurs qui réunissent entre eux les plots correspondant à tous les produits égaux entre eux.
Nous avons maintenant écrite, pour ainsi dire, sur l'appareil l'opération 4x3 = 12.
Il suffit de varier le tableau T et ses connexions avec les balais m pour que l'appareil exécute une autre quelconque des opérations arithmétiques. Il faut pourtant remarquer que, dans la multiplication et dans l'addition, on peut représenter indifféremment l'une ou l'autre des quantités données au moyen de l'une ou l'autre des règles x', x", tandis que dans les deux autres opérations il n'en va pas de même, parce qu'il ne s'agit plus de calculer des fonctions symétriques.
Dans la division, on obtient deux résultats : le quotient et le reste ; si on veut les obtenir tous les deux dans un même appareil, on pourra faire que la règle x' porte deux tableaux et la règle x" deux balais ; mais c'est là un détail qui n'a aucune importance en ce moment.
Dans tous ces arithmomètres, de même que dans celui de la multiplication qui a été décrit ci-dessus, il suffit d'inscrire les deux arguments de l'opération pour amener le contact entre M et le conducteur du faisceau m qui correspond au résultat de l'opération.
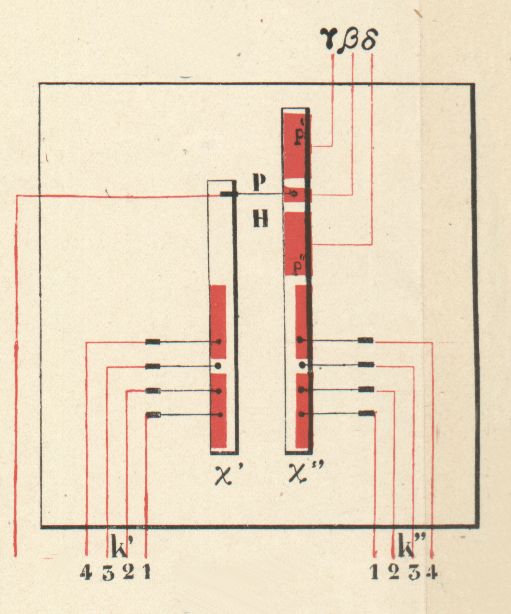 Figure 5
Figure 5
c) Comparer deux quantités (fig.5)
Les deux règles x' et x" sont manoeuvrées comme il a été dit par les balais conjugués avec elles.
L'une d'elles, x', porte un balai H et l'autre, x", trois plots. Quand les valeurs représentées par les deux règles sont égales, comme dans le cas actuel, l'extrémité du balai est en contact avec le plot P ; quand cette égalité n'existe pas, le balai H vient en contact avec le plot P' si c'est la quantité de gauche qui est la plus grande, et avec le plot P" dans le cas contraire.
d) Impression des valeurs données ou calculées
Elle peut être exécutée par une machine à écrire ; chaque touche correspondrait à une valeur différente et, au lieu de la pousser avec le doigt, on la pousserait avec un électro-aimant. Il y aurait donc autant d'électro-aimants que de touches.
Tous ces appareils pourront être utilisés par un calculateur, et le schéma 6 montre une disposition qui faciliterait leur emploi dans ce but.
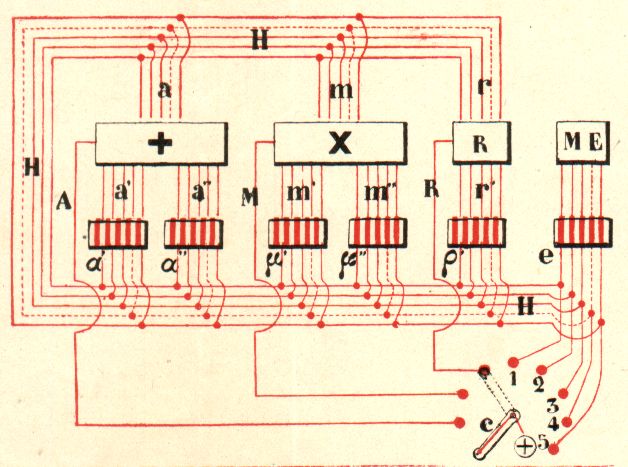 Figure 6
Figure 6
Les appareils décrits ci-dessus y sont représentés par des symboles très simples (*)
(*) On y voit un arithmomètre pour l'addition (+), un autre pour la multiplication (x), un enregistreur R et la machine à écrire ME. Nous pouvons supposer que ces appareils, analogues à ceux qui ont été décrits plus haut, sont enfermés dans des boites (représentées par les rectangles du dessin) qui ne laissent voir pour chacun d'eux que les faisceaux des facteurs (a', a" ; m', m" ; r'), celui du résultat (a, m, r) et le conducteur (A,M,R) destiné à rendre actif au moment voulu le résultat enregistré dans l'appareil.
Pour comprendre le fonctionnement, nous examinerons d'abord ce qui va se passer en supposant que le manipulateur c vient d'arriver à sa position indiquée en pointillé.
Il a rendu positif le conducteur R et aussi - d'après ce que nous venons de voir (fig.3) - un des conducteurs du faisceau H, celui qui correspondra à la valeur enregistrée en ce moment dans l'appareil R.
Nous supposerons que le conducteur actif est celui qui a été représenté en pointillé. Une branche de ce conducteur pénètre dans l'appareil destiné à la multiplication, mais il ne peut aboutir - comme on le voit dans la figure 4 - qu'à un plot isolé, ou au balai H, et par là au conducteur actuellement isolé M (fig. 6). On peut en dire autant relativement à l'appareil destiné à l'addition, mais celles qui aboutissent à m" et à e sont en contact, l'une avec un des conducteurs de l'arithmomètre, l'autre avec l'un des conducteurs de la machine à écrire. Le premier (voyez la fig. 4) fera fonctionner la règle m", mais le conducteur positif est celui qui correspond à la valeur enregistrée dans l'appareil R ; c'est à dire que cette même valeur sera représentée par la règle m" quand - l'opération finie - elle restera dans sa nouvelle position.
Le conducteur qui pénètre dans la machine à écrire fera que cette valeur soit écrite en même temps.
Le résultat de l'opération a donc été
1° D'inscrire comme facteur, par le déplacement de la règle m", la valeur qui était enregistrée en R ;
2° D'écrire cette même valeur par la machine.
Si maintenant on veut multiplier cette valeur par un nombre connu, il faudra :
1° Déplacer les verroux μ" et e vers la gauche pour couper la communication des balais qui y aboutissent ;
2° Rendre actif, par le moyen du commutateur c, le conducteur m correspondant à la valeur donnée ;
3° Déplacer μ' vers la droite, pour rétablir les communications dans ce verrou.
Un raisonnement absolument pareil à celui que nous venons de faire montrera que, dans ces conditions, on obtient comme résultat de l'opération exécutée par la machine l'inscription sur la règle x' (fig. 4) de la valeur i, représentée par le conducteur rendu actif.
Supposons encore qu'après que cette opération a été réalisée, nous déplacions les verrous e et α' vers la droite et le verrou μ' vers la gauche et que nous rendions actifs le commutateur M.
En même temps que celui-ci, nous rendrons actif, d'après ce qui a été dit en décrivant l'arithmomètre (fig.4), un des conducteurs du faisceau m, celui qui correspond au produit des quantités inscrites dans les règles x' et x" et, par les raisons déjà expliquées, ce produit se trouvera inscrit sur l'enregistreur R et sur la règle x de l'arithmomètre destiné aux additions. On peut continuer ainsi indéfiniment pour calculer une formule plus ou moins compliquée.
L'opération exécutée par l'automate est au fond toujours la même : enregistrer dans un ou plusieurs appareils (La machine à écrire est un appareil où le quantités à enregistrer sont imprimées au lieu d'être représentées par le déplacement d'un mobile) une opération toujours la même. Cette quantité peut être déterminée arbitrairement ou bien on peut la prendre dans l'un des appareils élémentaires où elle a été enregistrée comme conséquence des opérations antérieures.
La commande de cette machine est aussi très simple. On comprend que le rôle du calculateur qui l'utiliserait pourrait se réduire à appuyer de temps à autre sur certaines touches, et que ce travail peut être automatisé par un procédé analogue à celui qui a été employé pour l'écriture musicale dans les pianos mécaniques.
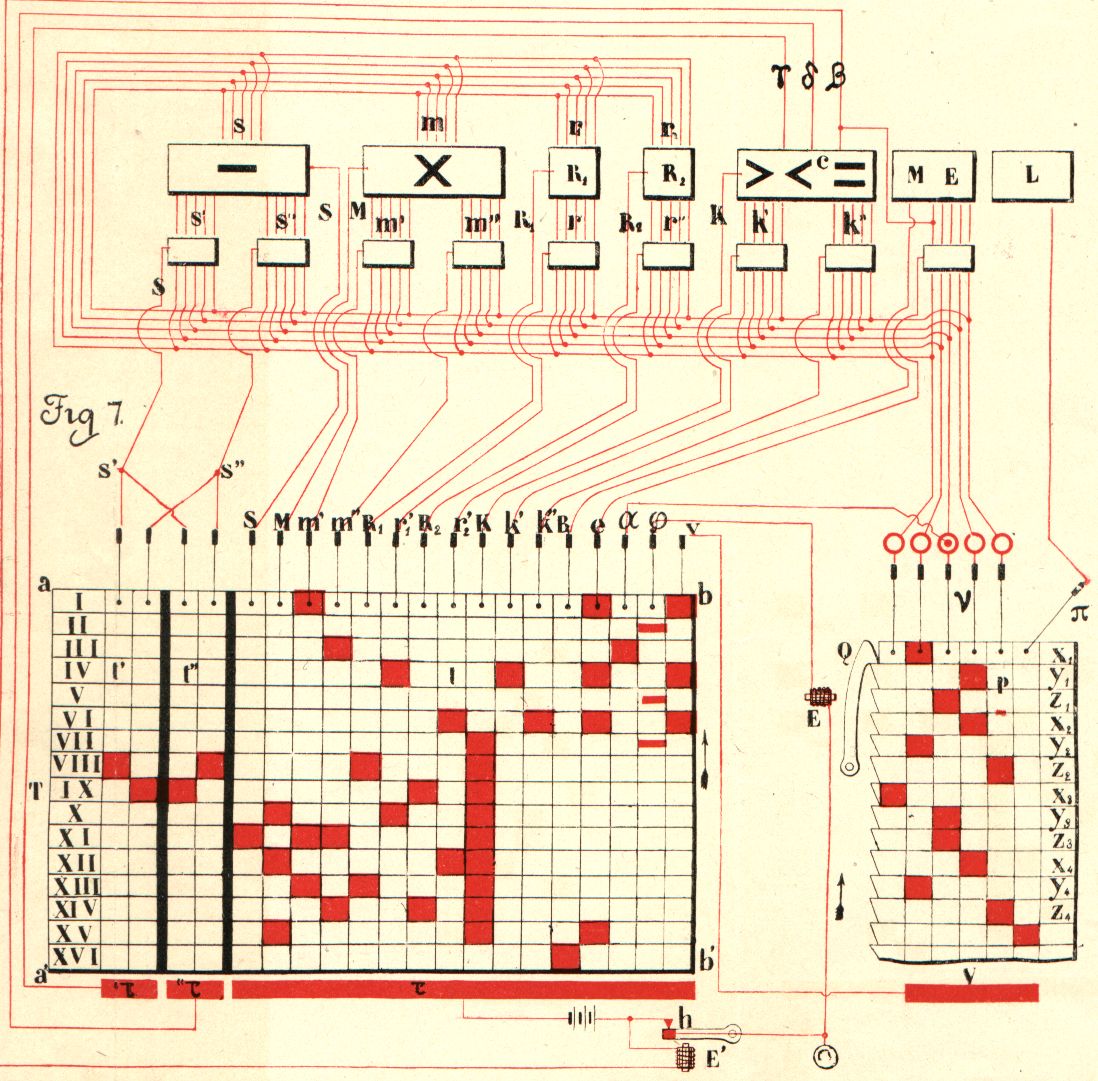

Le schéma de la figure 7 représente un automate disposé pour calculer la valeur de la formule
α = ax (y-z)2 sans le secours de personne.
On lui donnera la valeur du paramètre a et plusieurs systèmes de valeurs particulières des trois variables. L'automate doit exécuter tous les calculs, en écrire les résultats, et avertir que l'opération est terminée.
Son économie générale est facile à comprendre. On voit en haut tous les opérateurs nécessaires dans ce cas particuliers.
Deux arithmomètres, l'un pour la soustraction et l'autre pour la multiplication, qui sot les seules opérations indiquées par la formule.
Un comparateur qui servira à déterminer dans chaque cas laquelle des deux variables y ou z est la plus grande, pour les inscrire chacune à sa place dans l'appareil qui doit faire la soustraction ;
Une machine à écrire ;
Et deux enregistreurs dont nous verrons bientôt l'utilité.
Un peu plus bas se trouve une ligne de verrous analogues à ceux que nous avons vus dans la figure 6. Tous ceux que nous avons à considérer maintenant sont disposés de la même manière.
Dans la figure 7, on a supprimé les ressorts et les électro-aimants ; on n'y a laissé que les verrous et les conducteurs (s', s" ,m'...) destinés à mettre en activité l'électro-aimant qui commande chacun de ces verrous ; leur jeu se comprend aisément ; chaque fois qu'on rend actif un de ces conducteurs (e ou r'1, par exemple), on établit les communications du verrou correspondant (celui de la machine à écrire ou celui de l'enregistreur R).
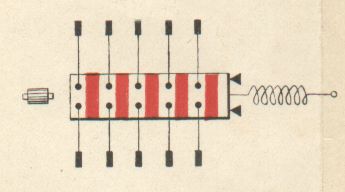 Figure 8
Figure 8
La disposition de ce verrou est indiquée dans la figure 8.
Dans la position actuelle, tous les balais sont isolés. Si l'électro-aimant entre en activité et attire le verrou, chacun des balais du groupe supérieur entrera en contact avec le balai correspondant du groupe inférieur.
La manoeuve est commandée par un tambour T (fig. 7) conjugué avec un groupe de balais s', s", S, M, m', m", R1, r'1, R2, r'2, K, k', k", R, e, α, φ, ν. Ce tambour est analogue à celui d'un orgue de Barbarie ; il porte plusieurs plots qui viennent en contact avec les balais s', s", .., φ, ν , à mesure que le tambour tourne dans le sens de la flèche. La distribution de ces plots est déterminée dans l'automate par la formule à calculer, de même qu'elle est déterminée dans l'orgue par la pièce à jouer.
Dans le schéma de la figure 7, cette distribution a été rendue visible parce qu'on y a représenté le développement de la surface du tambour. Cette surface est divisée en 16 zones horizontales numérotées. Quand le tambour tourne ans le sens indiqué par la flèche, toutes ces zones viennent, l'une après l'autre, passer sous les balais. Il est bien entendu que la première zone se présente immédiatement en contact avec la seizième, puisque les lignes ab et a'b' représentent en réalité une même génératrice de cylindre. Le tambour est divisé en trois sections (t,t',t") séparées dans la figure par des bandes noires verticales. Tous les plots de chaque section sont reliés métalliquement entre eux, et isolés des autres. En outre, il y a un contact métallique permanent entre la section t et le plot τ, et de même entre t' et τ' et entre t" et τ".
On voit encore dans le schéma une plaque rectangulaire P, de longueur indéfinie, conjuguée avec les balais nu. C'est sur cette plaque qu'on inscrira, par les plots qui y sont distribués, les valeurs particulières des variables x, y, z. Chaque valeur particulière sera inscrite sur une bande horizontale ; sur la première (cela est indiqué dans la figure) la valeur x1, sur la deuxième y1, sur la troisième z1 ; puis sur les quatrième, cinquième et sixième bandes, le second système de valeurs particulières données : x2, y2, z2 et ainsi de suite. On suppose dans le dessin que, dans ce cas particulier, le calcul doit porter sur quatre systèmes de valeurs.
Outre le groupe de balais destinés à la représentation des variables, il y a un balai π, dont l'objet est d'indiquer la fin de l'opération.
Cette plaque tend à marcher dans le sens de la flèche, mais elle est arrêtée par le cliquet Q. Tous les plots qu'elle porte sont en communication avec le conducteur V.
Avant de commencer l'opération, il faut aussi mettre en communication le balai α avec le conducteur qui représente la valeur du paramètre a, ce qui est indiqué dans le schéma en supposant qu'on a cloué une cheville sur le plot correspondant à cette valeur.
Il nous sera maintenant facile de suivre la marche de l'automate.
Nous considérerons successivement plusieurs intervalles de temps qui correspondent chacun au passage d'une des zones horizontales du tambour T sous la ligne formée par les extrémités des balais.
J'ai indiqué dans le tableau quels sont les balais qui, pendant chaque intervalle, se trouvent en contact avec les plot des trois sections t, t' et t" ; le tableau n'est du reste que la traduction de ce qu'on peut lire également dans le développement du tambour.
Les explications que nous avons données en décrivant le schéma de la figure 4 suffisent pour comprendre ce qui va se passer dans chaque intervalle.
1.- Sont rendus positifs les balais ν, m', e. Le balai ν, à son tour, rend positifs tous les plots de la plaque P et, comme conséquence, le balai du groupe ν qui correspond à la valeur particulière x1.
Les balais m' et e établissent (fig. 8) les communications des verrous correspondants, et par conséquent, la valeur x1 est en même temps écrite par la machine et représentée comme facteur dans l'arithmomètre.
2.- Le balai φ, qui devient positif momentanément, fait agir l'électro-aimant E. Celui-ci attire son armature et permet que la plaque P s'avance d'un pas. Elle avance lentement pour ne pas faire plusieurs pas pendant que E reste actif.
3.- Le balai α rend actif le conducteur qui représente le paramètre désigné par la lettre a, et le balai m" fait que cette valeur soit inscrite comme second facteur dans l'arithmomètre. Nous avons donc enregistré dans cet arithmomètre le produit ax1.
4.- Le balai ν devient encore une fois positif ; mais, comme la plaque P s'est avancée d'un pas, c'est maintenant le conducteur correspondant à la valeur y1 qui va devenir positif.
Cette valeur, d'après les indications des la figure, sera enregistrée en R1, sera imprimée par la machine à écrire et en même temps sera représentée, comme premier terme de comparaison, dans l'appareil C.
5.- La plaque P avance d'un pas.
6.- La valeur z1 est enregistrée en R2, écrite par la machine et représentée comme second terme de comparaison, dans l'appareil C.
7.- Le balai φ fait que la plaque P s'avance d'un nouveau pas.
L'action du balai K est plus intéressante à considérer. Il rend actif :
1° le conducteur β si y1 = z1 ;
2° le conducteur γ si y1 > z1;
3° le conducteur δ si y1< z1;
Premier cas : y1 = z1. Puisque y1 = z1, il n'y a pas lieu d'aller plus loin dans les calculs : on peut écrire α = 0 et c'est là ce que fait l'automate en rendant actif le conducteur β qui va dans la machine à écrire et qui correspond précisément à la valeur zéro. En outre, il fait fonctionner l'électro-aimant E qui coupe le contact en h. Or nous avons déjà dit que tous les conducteurs qui partent des opérateurs de la machine à écrire et des verrous pour se rendre au pôle négatif de la pile passent par la borne ω ; donc, du moment que la communication entre cette borne et la pile est coupée, aucun de ces appareils ne peut plus fonctionner. La non-communication durera autant que le contact entre le balai K et le plot, qui s'étend sans interruption jusqu'à la 15e bande inclusivement ; le tambour T continuera donc à marcher, mais l'automate ne réalisera aucune opération.
Deuxième cas : y1 > z1. Le conducteur γ, rend positifs les plots de la section t' et la marche des opérations continue comme il suit :
8. - Les balais actifs R1 et s' font que la valeur enregistrée en R1 (la valeur y1) soit transportée dans la règle z' (fig. 4) de l'appareil destiné à faire la soustraction.
9. - La valeur z1 est inscrite dans la règle z" du même appareil. La valeur enregistrée dans celui-ci, comme résultat de l'opération, sera donc y1 - z1.
Troisième cas : y1< z1. Le conducteur δ rend actifs les plots de la section t" et, comme on le voit dans le tableau et dans la figure, on altère par rapport au cas antérieur l'ordre dans lequel sont rendus positifs les conducteurs s' et s", ce qui fait qu'on inscrit z1 dans la règle x' et y1 dans la règle x". La valeur enregistrée dans l'appareil sera z1-y. En réalité, maintenant, y1 - z1 est une quantité négative, mais l'automate n'a pas à s'occuper des signes, dans ce cas particulier, parce que c'est le carré de la différence qui intervient dans les calculs, et ce carré sera toujours positif.
A partir de ce moment, la marche des calculs est la même pour ces deux derniers cas.
10.- L'automate, pour continuer le calcul, doit élever au carré la différence y1 - z1(positive ou négative). Cela lui est très facile en utilisant l'arithmomètre de la multiplication, mais, en réalisant cette nouvelle opération, la valeur du produit ax1 qui était enregistrée va disparaître. Or cette valeur doit figurer ultérieurement dans les calculs ; il faut donc en prendre note avant de l'effacer, et c'est ce que fait l'automate dans l'intervalle actuel ; il enregistre la valeur ax1 dans l'appareil R1. Il efface en même temps la valeur y1, car il n'a plus besoin de celle-ci.
11.- La différence y1 - z1 ou z1 - y1 est inscrite en même temps dans les deux règles m' et m" de l'appareil M.
12.- La valeur (y1-z1)2 est enregistrée en R2.
13.- Le produit ax1 est inscrit comme premier facteur dans l'appareil M.
14.- La valeur (y1-z1)2 est inscrite comme second facteur.
15.- La valeur α1 est écrite par la machine et l'opération est finie pour le premier système de valeurs particulières données.
16.- Il faut que la machine à écrire laisse un blanc entre le premier système de valeurs et le second qui va être écrit immédiatement ; à cet effet, il faut rendre positif le conducteur B, et cela dans les trois cas que nous avons considérés; c'est pourquoi le plot qui entre en contact avec le balai K ne se prolonge que jusqu'à la bande XVI, de sorte qu'à la fin de l'intervalle XV l'électro-aimant E' lâche son armature, le contact se rétablit et la machine à écrire fonctionne dès que le balai B devient actif, même dans le cas y1 = z1.
Mais le tambour T ne s'arrête pas, il continue de tourner. Comme nous l'avons vu tantôt, la fin de la période XVI coïncide avec le commencement de la période 1; les mêmes calculs sont donc recommencés; seulement, comme la plaque P s'est avancée de trois pas, pendant le premier tour du tambour T, les valeurs x1, y1 et z1 seront remplacées respectivement par x2, y2 et z2. L'automate calculera donc une seconde valeur particulière α2, et puis toute les autres, sans discontinuer.
On voit dans la plaque P, à la suite de tous les plots qui correspondent aux valeurs particulières des variables x, y, z, un plot qui entre en contact avec le balai π, dont le but est de signaler la fin des calculs et d'arrêter l'automate. Cette manoeuvre s'explique facilement : après que la dernière valeur de α a été calculée, le tambour commence un nouveau tour, rend positif le balai ν et, par conséquent, le balai pi laisse passer un courant qui traverse l'appareil L, amène le débrayage du tambour T, coupe la communication de la pile avec l'automate, en somme fait le nécessaire pour arrêter l'opération et, en même temps, si l'on veut, annonce le fait, en faisant sonner un timbre ou autre signal convenu.
Cet exemple suffit à faire ressortir la généralité de la méthode. L'automate prend chaque valeur dont il a besoin, soit dans la plaque P, quand elle y figure parmi les données, soit dans l'un des opérateurs où elle est enregistrée, comme résultat d'une opération antérieure. Il exécute une à une toutes les opérations indiquées dans la formule à calculer, et il écrit tous les résultats qu'il faut conserver.
L'automate procède en tout comme un être intelligent qui suit certaines règles, mais je tiens à faire remarquer spécialement qu'il procède comme un être intelligent au moment où il faut chohisir le chemin à prendre dans chaque cas particulier ; avant de faire la soustraction indiquée dans la formule, il compare les deux quantités qui doivent être retranchées l'une de l'autre ; si elles sont égales, il écrit pour alpha la valeur zéro et attend sans rien faire que le tambour T ait fini le tour ; si les deux quantités ne sont pas égales, les opérations se continuent, mais elles peuvent suivre deux chemins différents ; la différence consiste seulement en ce que l'ordre d'inscription des deux variables y, z varie d'un cas à l'autre, parce qu'il faut inscrire la plus grande d'entre elles dans la règle x', et la plus petite dans la règle x".
Certes, le cas considéré est très simple, mais la méthode est tout à fait générale.
Dans d'autres cas, les règles imposes à l'automate pour déterminer la route à suivre seront beaucoup plus compliqués ; pour prendre une décision, il devra connaître plusieurs valeurs, données ou calculées dans les opérations antérieures ; il devra savoir si un certain fait s'est produit, ou bien encore si une certaine quantité qui figure dans les calculs est réelle ou imaginaire. Mais chacune de ces circonstances, et d'autres du même genre qui peuvent avoir à intervenir dans les décisions de l'automate, seront inscrites, une à une, pendant la marche des opérations, ans un appareil analogue à celui qui a été décrit en commençant (fig.2).
Il suffira à l'automate, pour décider le chemin qu'il doit suivre, de rendre positif le conducteur R au moment voulu. Ce chemin arrivera, peut-être, à d'autres points de bifurcation, et, dans chacun d'eux, l'automate fera son choix en appliquant le même procédé.
J'ai insisté sur ce point parce qu'il est d'une importance capitale pour définir l'étendue de l'Automatique.
On affirme généralement qu'un automate ne peut jamais procéder par tâtonnements, et je tenais à faire voir que cette affirmation n'est pas fondée, ou du moins elle ne l'est pas quand on connaît avec précision les règles qu'il faut suivre dans les tâtonnements, et c'est là le seul cas qui nous intéresse.
Il est évidemment impossible de réaliser le schéma de la figure 7 dans des conditions d'utilité pratique, mais cela ne vient pas des difficultés présentées par l'automatisation. Celle-ci est obtenue par la disposition du tambour T et des balais conjugués avec lui ; c'est dans le tambour qu'on a écrit au moyen de plots la formule à calculer ; or, le tambour et ses balais seraient facilement construits.
La difficulté vient des opérateurs et de la plaque P, et encore elle ne dépend pas de la nature des mécanismes que la construction de ces appareils exige ; elle dépend exclusivement du grand nombre de valeurs particulières que peuvent prendre les variables qui interviennent dans les calculs. Si ce nombre était très limité - quinze, vingt, ou même cent, par exemple - le schéma pourrait être construit à peu près tel qu'il a été décrit.
On peut lever la difficulté (on l'a levée dans tous les arithmomètres connus) en appliquant le principe de la numération décimale.
Un nombre de plusieurs chiffres est traité dans les opérations usuelles de l'Arithmétique, non pas comme une quantité simple, mais comme une quantité complexe : comme une somme de plusieurs quantités dont chacune est égale au produit d'un nombre d'un seul chiffre par une puissance entière de dix.
L'opération la plus simple, une addition, une multiplication, se transforme ainsi en une série d'opérations partielles, mais cette complication a été absolument nécessaire pour rendre possibles les calculs numériques, par ce fait que, dans chacune des opérations élémentaires, on ne doit prendre en considération que des nombres plus petits que dix.
Chaque arithmomètre utilisé par l'automate dans ses calculs ne sera plus un appareil élémentaire, mais une machine compliquée dans le genre de l'automate de la figure 7.
L'automate, au moment voulu, lui donnera les deux valeurs particulières qui doivent figurer comme facteurs ou arguments, et déclanchera l'opération. Une fois celle-ci finie, et le résultat enregistré, l'automate aura connaissance de ce fait par un conducteur pareil à π (fig. 7), et continuera ses calculs.
Il n'y a pas lieu d'entrer ici dans des détails sur la manière de réaliser ces opérations, car elles sont analogues à celles dont nous avons ébauché la description, et j'espère qu'on admettra leur possibilité (On pourrait aussi, d'après ce qui a été dit en commençant, construire un automate qui manipulerait un arithmomètre ordinaire. Il devrait alors déclancher à temps l'opération nécessaire : faire faire un tour à la manivelle, déplacer le totalisateur, etc. ).
Par ce moyen, nous avons rendu possibles, en les multipliant, les opérations élémentaires, mais leur nombre a été considérablement augmenté.
Les très grands nombres sont aussi embarrassants dans les calculs mécaniques que dans les calculs usuels (Babbage prévoyait 50 roues pour représenter chaque variable, et encore elles ne seraient pas suffisantes si on n'a pas recours aux moyens que j'indiquerai plus loin, ou à un autre analogue). Dans ceux-ci, on les évite ordinairement en représentant chaque quantité par un petit nombre de chiffres significatifs (six à huit tout au plus, sauf les cas exceptionnels) et en indiquant par une virgule ou des zéros, s'il y a lieu, l'ordre de grandeur des unités représentées par chaque chiffre.
Parfois aussi, pour ne pas à avoir à écrire beaucoup de zéros, on écrit les quantités sous la forme n x10m.
Nous pourrions simplifier beaucoup cette écriture en établissant arbitrairement ces trois règles simples :
I. n aura toujours le même nombre de chiffres (six, par exemple).
II. Le premier chiffre de n sera de l'ordre des dixièmes, le second des centièmes, etc.
III. On écrira chaque quantité sous cette forme, n ;m.
Ainsi, au lieu de 2435,27 et de 0,00000341682, on écrira respectivement 243527 ; 4 et 341862 ; -5.
Je n'ai pas indiqué de limite pour la valeur de l'exposant, mais il est évident que, dans tous les calculs usuels, il sera plus petit que cent, de sorte que, dans ce système, on écrira toutes les quantités qui interviennent dans les calculs avec huit ou dix chiffres seulement.
On peut appliquer ce système aux arithmomètres dont nous nous occupons maintenant, et réduire ainsi suffisamment le nombre des opérations élémentaires. Par contre, les règles pour chacune de celles-ci seront plus compliquées, mais il n'y a aucune difficulté à les formuler d'abord et à les traduire ensuite dans le tambour de l'arithmomètre.
Voué depuis longtemps à l'étude de ces questions, j'ai établi un schéma très complet, et même pour certaines parties un avant-projet d'arithmomètre, et je pense qu'il est possible d'arriver à des solutions pratiques, mais je ne prétends pas démontrer ici cette affirmation. Cela exigerait des développements qui ne peuvent pas prendre place dans cet article. J'ai voulu seulement signaler le chemin que j'estime le plus praticable pour arriver au but.
Je dirai pourtant quelques mots sur les avantages du système électro-mécanique que j'ai tâché d'appliquer dans mes études et dans mes expériences.
On préconise généralement pour ces appareils les solutions exclusivement mécaniques, et même on recommande de s'en tenir autant que possible aux mécanismes rigides, en supprimant les ressorts. En somme, on veut avoir une confiance absolue dans la bonne marche de la machine on veut que, tant que la machine ne se détériore pas, les résultats de ses calculs soient absolument exacts.
Or, il est évident que ce résultat ne peut pas être obtenu par des moyens électromécaniques : un contact peut manquer, et le résultat de l'opération en sera alors généralement faussé.
J'ai donc, comme tout le monde, pensé d'abord aux solutions mécaniques, mais là les difficultés paraissaient absolument insurmontables.
Le grand nombre de mécanismes à considérer, les multiples connexions qu'il faut établir entre eux, la nécessité d'avoir des dispositifs qui permettent d'altérer à chaque moment ces connexions, la difficulté de combiner le tout sans que les mécanismes se gênent les uns les autres et sans que les frottements empêchent les mouvements, beaucoup d'autres difficultés pratiques qu'on pourrait citer encore rendent le problème presque inabordable.
Il a fallu le génie mécanique de Babbage pour l'attaquer, et encore, bien que pour le résoudre il ait dépensé sans compter son intelligence, son travail, son argent et celui de son pays, il n'a pas obtenu des résultats encourageants.
Babbage avait, quand il entreprit le projet de sa machine analytique, une préparation théorique et pratique tout à fait exceptionnelle ; mathématicien distingué, il avait en outre travaillé pendant dix années à la construction de la machine des différences, et d'après le rapport M. Merrifield à l'Association Britannique, ces travaux sont une merveille de mécanique. u reste, tous les savants qui ont eu à juger l'oeuvre de Babbage ont été frappés de l'ingéniosité et de la fécondité dont il a fait preuve dans son invention.
M. Babbage eut à sa disposition un atelier installé par le Gouvernement anglais pour la construction de la machine, et un laboratoire (establishment) qu'il monta chez lui à ses frais pour les études et les essais. Il a dépensé tout près d'un million de francs : 500.000 de sa fortune et 425.000 qui lui ont été fournis par le Gouvernement.
Il a élaboré un système de notations mécaniques, système qui représente un travail énorme, pour pouvoir se débrouiller dans ses dessins. Il a étudié un grand nombre de solutions ; il a fait, en somme, de cette oeuvre, l'oeuvre de sa vie, et il y a travaillé sans relâche pendant trente ans.
Mais, malgré ses grands mérites, incontestables et incontestés, malgré son intelligence, son dévouement et sa constance, il a échoué. Ses dessins et ses modèles sont conservés au musée de Kensington, mais il est à craindre qu'ils ne soient jamais utiles à personne.
M. Babbage comptait écrire un livre : Histoire de la machine analytique, mais la mort l'a surpris sans qu'il pût réaliser ce projet, et son fils lui-même, qui a été son collaborateur, déclare qu'il ne connaît pas ses travaux dans tous leurs détails.
Un autre triomphera peut-être un jour là où Babbage a échoué, mais la chose ne paraît pas aisée, et il serait téméraire à mon vis de suivre ses pas, tant que noue ne serons pas en possession de principes mécaniques nouveaux qui nous donnent l'espoir de vaincre les difficultés de la route.
Ce n'est pas mon cas.
Les difficultés d'une solution purement mécanique me paraissent insurmontables, du moins avec les moyens dont je pourrais disposer. Pour mieux dire, tant que, dans mes études sur les machines à calculer, je n'ai envisagé que des solutions mécaniques, je partageais l'opinion générale ; je ne croyais pas possible de résoudre le problème des calculs mécanique avec toute la généralité qu'il comporte, tel que je l'ai examiné ici.
C'est l'étude du télékine qui m'a mis sur la voie de ces nouvelles machines et des études d'automatique dont je viens de parler.
Le télékine est en somme un automate qui exécute les ordres qu'on lui envoie par la télégraphie dans fil. en outre, pour interpréter les ordres et agir à chaque instant dans la forme voulue, il lui faut prendre en considération diverses circonstances. Sa vie de relation est donc assez compliquée.
Pendant la construction des différents modèles de télékine que j'ai essayés, j'ai eu l'occasion d'apprécier pratiquement la grande facilité que donnent pour ces constructions les appareils électro-mécaniques, et j'ai pensé qu'on pourrait les appliquer avec succès aux machines à calculer.
L'insécurité qu'on leur reproche est souvent efficacement combattue. On voit fréquemment des machines électro-mécaniques qui marchent longtemps sans se dérégler. Les grands réseaux télégraphiques ou téléphoniques fonctionnent en général très régulièrement, et les interruptions et les erreurs que tout le monde peut constater peuvent être imputées presque toujours, soit aux employés, soit au vent ou à la pluie, qui produisent des avaries sur les lignes.
Il y a encore une cause qui dérange souvent ces appareils : c'est la production d'étincelles provoquées par la rupture des circuits. Ces étincelles oxydent et salissent les métaux et finissent par les empêcher d'entrer en contact. L'importance de cet inconvénient provient de ce que, dans les machines compliquées, les points de rupture des courants sont très nombreux et se trouvent parfois cachés, de sorte qu'il est très difficile de les visiter.
Mais on peut, je pense, y remédier radicalement. Tous les circuits partiront du pôle positif pour arriver au pôle négatif ; donc il sera possible, en théorie au moins, de les couper dans un même point ; or, je crois, après avoir étudié posément la question, que cette possibilité théorique peut être pratiquement réalisée, et alors, n'ayant à s'occuper - au point de vue des étincelles - que d'un seul contact, il sera facile, en employant des précautions connues de tous les techniciens, de les tenir toujours en bon état.
Je pense donc qu'avec une construction très soignée on arrivera à obtenir une sécurité suffisante. Elle ne sera pas absolue certainement ; elle ne sera même pas aussi grande que celle qu'on pourrait obtenir avec des appareils exclusivement mécaniques, mais elle sera, je pense, égale ou supérieure à celle que peut nous offrir un calculateur habile. Or, cela suffit évidemment, puisque les calculateurs obtiennent des résultats auxquels nous accordons toute notre confiance.
Ils y arrivent en répétant les calculs et plus souvent en les effectuant à deux mains, et les deux procédés pourraient être imités automatiquement ; mais, malheureusement, il n'est pas encore nécessaire de nous occuper de ces questions.